
 NextPCB Capabilities
Printed Circuit Boards
NextPCB Capabilities
Printed Circuit Boards
 PCB Assembly
PCB Assembly
 Layer Buildup
Layer Buildup
 SMD-Stencils
SMD-Stencils
 PCB Design-Aid & Layout
PCB Design-Aid & Layout
 Mechanics
Mechanics
 Quality
Quality
 Drills & Throughplating
Drills & Throughplating
 Factory & Certificate
Factory & Certificate
 PCB Assembly Factory Show
Certificate
PCB Assembly Factory Show
Certificate
Support Team
Feedback:
support@nextpcb.com



Firstly, what is the procedure?
Both standard aspects of the procedure are as complies with :
Initially, the program code (might be shared by various other procedures implementing the very same program).
Second, the information collection is related to the code. The information collection related to the code right here describes the information section as well as the procedure control block PCB. A procedure is a vibrant summary, however, it does not imply that all procedures are running. (Procedures remain in different states in memory because of plan or organizing needs).
Mentioning PCB is not strange, initial consider what aspects are consisted of in the PCB:
This information framework is a framework, produced as well as handled by the os. Allow's have a look at the task_struct to see exactly how the os controls as well as routines the procedure with the procedure control block.
This information framework, which is specified in the Linux-2.6.38.8/ include/Linux/sched. h documents. Allow's present the complicated participants of tast_struct:
1. volatile long state;/* -1 unrunnable, 0 runnable, >0 stopped */
The above variable is a member explaining the state of the procedure. The expertise that we found out along with the C language unpredictable keywords is to decrease the compiler's optimization of the code. The state variable constantly reviews the material from the variable's memory as opposed to the register; hence guaranteeing the procedure. The security of real-time access to system condition.
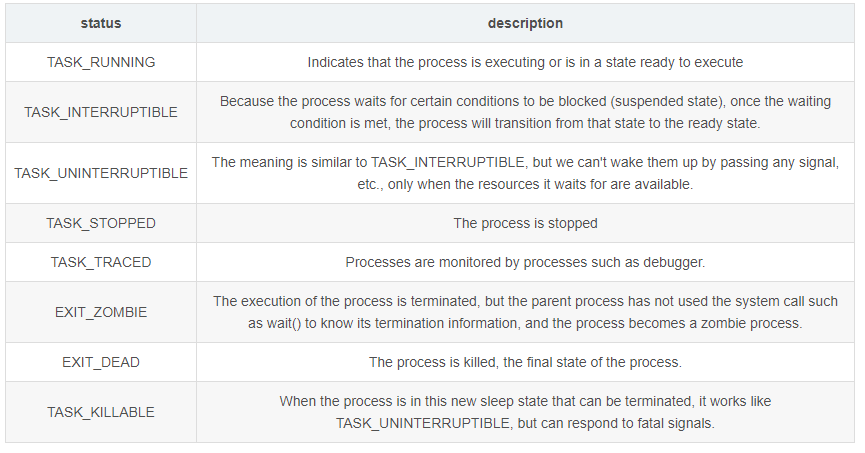
The feasible worths of the state participant are as adheres to.
#define TASK_RUNNING 0
#define TASK_INTERRUPTIBLE 1
#define TASK_UNINTERRUPTIBLE 2
#define TASK_STOPPED 4
#define TASK_TRACED 8
/*in tsk->exit_state */
#define EXIT_DEAD 16
#define EXIT_ZOMBIE 32
#define EXIT_TRACE ( EXIT_ZOMBIE | EXIT_DEAD )
/* in tsk->state again */
#define TASK_DEAD 64
#define TASK_WAKEKILL 128 /**wake on signals that are deadly**/
#define TASK_WAKING 256
#define TASK_PARKED 512
#define TASK_NOLOAD 1024
#define TASK_STATE_MAX 2048
/* Convenience macros for the sake of set_task_state */
#define TASK_KILLABLE (TASK_WAKEKILL | TASK_UNINTERRUPTIBLE)
#define TASK_STOPPED (TASK_WAKEKILL | __TASK_STOPPED)
#define TASK_TRACED (TASK_WAKEKILL | __TASK_TRACED)
Pid_t pid; //identifier of the process
Pid_t tgid //thread group identifier
The procedure identifier is to differentiate each procedure; this is presented since Unix designers desire the same collection of strings to have the very same PID, so tgid is presented.
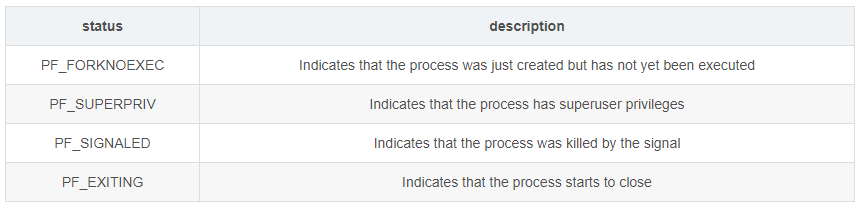
unsigned int flags; /* per process flags,defined below*/
The condition details of the flags response procedure, utilized by the bit to recognize the condition of the existing procedure.
Frequently utilized states are as adheres to:
unsigned int flags; /* per process flags,defined below*/
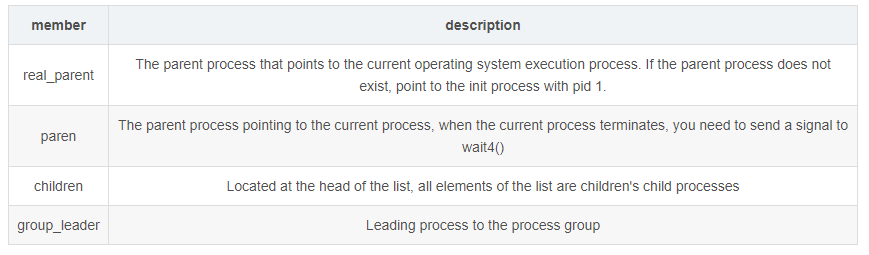
a participant standing for a procedure kinship.
/*
* pointers to (original) parent process, youngest child, younger sibling,
* older sibling, respectively. (p->father can be replaced with
* p->real_parent->pid)
*/
struct task_struct __rcu *real_parent; /* real parent process */
struct task_struct __rcu *parent; /* recipient of SIGCHLD, wait4() reports */
/*children/sibling forms the list of my natural children*/
struct list_head children; /* list of my children */
struct list_head sibling; /* linkage in my parent's children list */
struct task_struct *group_leader; /* threadgroup leader */
The place offers mom and dad procedures that can be utilized to manage the procedure of a kid procedure. It is commonly utilized for breakpoint debugging. When it is readied to 0, it indicates no trace is needed.
int prio, static_prio, normal_prio;
unsigned int rt_priority;
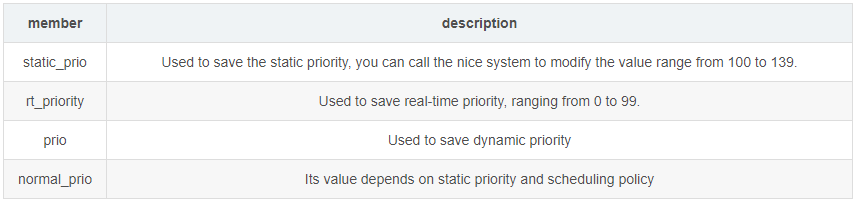
Fixed concern:
Meaning: He does not transform with time, the bit will certainly not change it proactively, just the system phone call great to customize static_prio.
Dynamic top priority:
Interpretation: The scheduler awards the IO-consuming procedure or punishes the CPU usage procedure by or decreasing the fixed-top priority of the procedure. The modified top priority is the vibrant concern (prio).
Real-time top priority:
Meaning: Real-time concern is just legitimate for real-time procedures.
In the variety of real-time concerns as well as a fixed top priority, the bigger the worth, the reduced the concern.
Still, need help? Contact Us: support@nextpcb.com
Need a PCB or PCBA quote? Quote now



 Surface
Surface

